- 会員限定
- 2017/10/23 掲載
脳型の認知アーキテクチャによる人工知能は、どのぐらいヒトに近づいたのか
海馬ハッカソンレポート前編
NPO法人全脳アーキテクチャ・イニシアティブ(以下、WBAI: The Whole Brain Architecture Initiative)主催で、第3回全脳アーキテクチャ・ハッカソン「目覚めよ海馬! 汎用人工知能プロトタイプに向けた海馬モデルの組み込み」が開催された。3日間にわたり、全8チームがマウス行動実験における3種の迷路を解く課題にチャレンジ。ここでは本ハッカソンでの取り組みを紹介したい。
(取材・執筆:井上猛雄、監修協力:NPO法人全脳アーキテクチャ・イニシアティブ)

「脳型の認知アーキテクチャ」をテーマにした海馬ハッカソンとは?
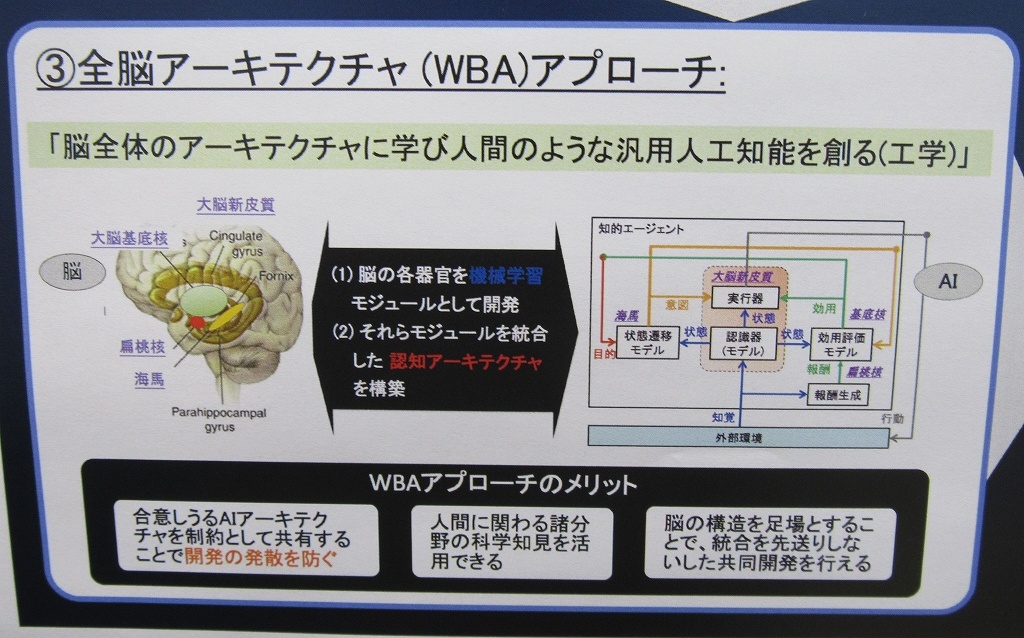
WBAIは、人と同じように考え、さまざまなタスクに幅広く対応できる「汎用人工知能」(AGI: Artificial General Intelligence)の開発を長期的にわたって支援するために設立された非営利活動法人だ。人工知能、神経科学、認知科学の領域を横断し、全脳アーキテクチャの実現を目指している。関連記事
WBAIは、2015年から毎秋に全脳アーキテクチャ・ハッカソンを開催している。第1回は「複合機械学習」を、第2回は「認知アーキテクチャ」をテーマにしたが、第3回目となる今回は海馬の計算モデルを組み込むことでいよいよ全脳アーキテクチャに組み込むことに挑戦した(注1)。
(注1)海馬:海馬は、大脳辺縁系の一部で、ヒトでは大脳側頭葉の内下部にある。長期記憶の形成や、空間学習に重要な役割を果たす。湾曲した細長い構造がタツノオトシゴに似ていることから海馬と名付けられた。特徴的な層構造をした細長い形をしており、CA1、CA2、CA3、歯状回の部位からなる。なお、海馬体という場合には、海馬支脚などをふくむ。
哺乳類(人間を含む)の脳の高次機能は、主に「新皮質」+「基底核」+「海馬体」+「小脳」の組み合わせで実現され、このうちの新皮質系と基底核系の連携を脳の実行系コアと考えれば、新皮質系と海馬の連携は脳の認識系コアとみなせるという。
よく知られている深層強化学習では、新皮質の認識部分に対応する「深層学習」と、大脳基底核と対応する「強化学習」を組み合わせ、従来より汎用性が高い認知アーキテクチャを実現してきている。これに対して海馬体は、新皮質全体の情報を統合し、エピソード記憶や自己位置推定、長期記憶形成といった「いま、ここ」を作り出す。
そこで今回のハッカソンでは、WBAIが事前に用意した新皮質+基底核モジュールに対して、参加チームが構築連携する海馬モデルを組み込んだエージェントを制作した。これにより、さまざまな認知タスクを単一エージェントで実行できる汎用性の高い脳型認知アーキテクチャのプロトタイプを目指したという。
WBAIでは、開発を促進しながらAGIを民主化するために、全脳アーキテクチャの共同開発を行うためのオープンプラットフォームの提供を始めている。この中では機械学習を脳のように接続するための脳型アーキテクチャ「WBCA(注2)」を利用している。
(注2)WBCA(Whole Brain Connectomic Architecture):脳の神経回路配線(Connectome:コネクトーム)の知見をベースに整備された全脳アーキテクチャの開発基盤のひとつで、AGIの効率的な開発を可能にする。WBCAのコネクトーム情報は、BriCA言語というアーキテクチャ記述言語で表現される。
3つの迷路を進むエージェント、どう解決しようとしたのか
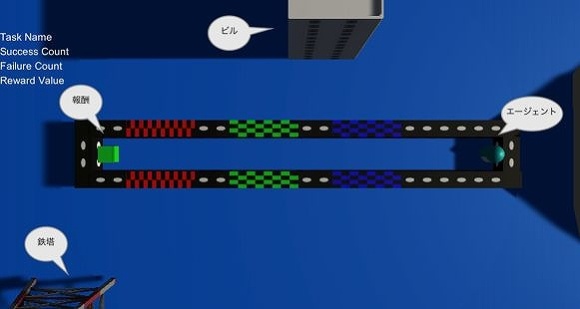
ハッカソンの開催にあたり、WBAIは前出の汎用人工知能開発プラットフォームや、Unityによる迷路タスクを提供する環境、たたき台となる認知アーキテクチャのサンプルコード(Pythonで記述)を用意した。各参加チームは脳を参考にしたAIエージェントを制作し、規定課題競技や自由課題競技をクリアしてゆく。規定課題競技として「1次元迷路」「十字迷路」「矢尻迷路」の各迷路で設定された複数の課題をクリアしていく。エージェントと環境は離散的な時間ごとに1ステップずつ進む。1ステップは0.15秒に相当するとして、それごとに1メートルずつすすむので、計20ステップほどでスタート地点からゴール地点まで到達できるようになっている。
1次元迷路には、自己位置を推定する手がかりとなる4つのランドマークがあり、迷路の全長は24メートル。スタートからゴールまでに、緑や白黒のチェック柄の壁がある。この迷路を使った競技は8つあり、ある競技ではエージェントが中間地点に到達し、2秒間ほど待機すると報酬が得られる。ゴールすれば、さらに報酬が加算 。ここでは11個の競技において、段階的に課題の難易度を挙げている。たとえば、中間地点がスタート側やゴール側に移ったり、壁の色が消失し、すべて白黒に統一されており、参加チームがこれらの課題をクリアしていく。
次の十字迷路には2つのランドマークがあり、迷路の中央から奥までの一辺の距離は12メートル(端から端までは24メートル)。3ヵ所のスタート地点がランダムに設定され、そこからエージェントが残りの1ヵ所の報酬地点に向かって報酬を得る課題だ。

またスタート地点が十字中央にあり、そこから壁奥にある3つの報酬地点に向かう課題もクリアする。
矢尻迷路にも2つのランドマークがある。
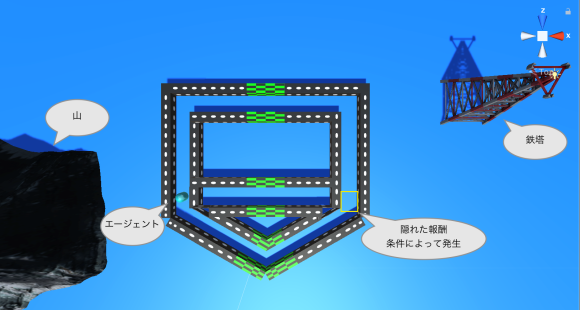
迷路下側の2等辺三角形(矢尻部)の角度は120度で、単純な正三角形でマッピングできないように設計。矢尻部左上がスタート地点で、対向にゴール地点がある。距離が長い上周りか、距離が短い下周りルートで報酬を探索する。中間地点で2秒待機すると報酬が得られる。競技途中に中間ルートが現れたり、下回りルートに赤壁が出現して通れなくなるなど、難易度も変化する。
開発されたシステムは、神経生物学的妥当性(海馬内活動、行動機能、脳領域構造)30点、規定課題点30点、工学的価値40点(工学的有用性、オリジナリティ、審査委員の裁量による得点)の配点で評価され、最優秀・優秀賞などを選出。
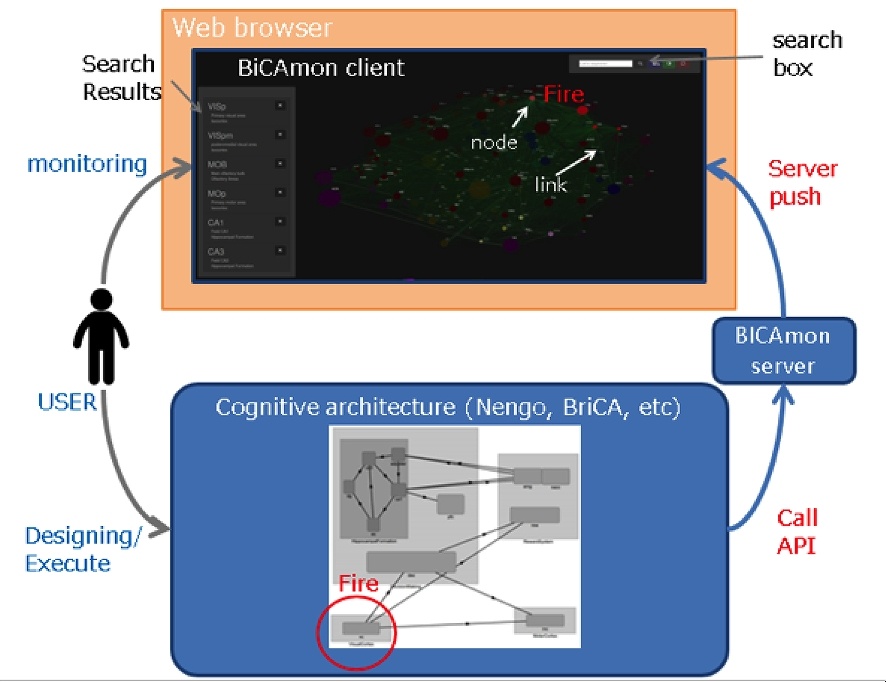
さらに本競技では、前出の汎用人工知能開発プラットフォーム「BriCA/WBCA」や認知アーキテクチャの活動を可視化するツール「BiCAmon」の利用も加点対象だ。
【次ページ】同じ課題で苦心、奨励賞を獲得した2チームの取り組み
関連コンテンツ
関連タグ
タグをフォローすると最新情報が表示されます
関連コンテンツ
あなたの投稿
PR
PR
PR
