- 会員限定
- 2017/05/16 掲載
自律飛行型ドローンによる農作物生育管理は実現するか? 国が認めない3つの理由とは
秋田県大館市は、青森の県境に近い場所にある。ここに県内屈指の老舗製造業、東光鉄工が居を構えている。同社は2年前から産業用ドローン分野に本格的に参入した。特に農薬散布向けの機体を開発し、ビジネスに結び付けようとしている。精密農業を実現する同社の独自ドローンの取り組みと課題について紹介しよう。
厳しい審査をクリアしなければならない農薬散布用ドローン
日本国内において、農薬散布は最も厳しい基準に則って規制されている。なぜ、これほど国の規制が厳しいのだろうか? それは農薬は劇物に属し、もしもドローンが墜落すれば大変な事故になるからだ。事故だけなく、故意に墜落させればテロにもなりかねない。実際に2年前に、首相官邸にドローンが墜落したこともある。そこで航空法が改正され、原則的に危険物の搬送や投下が禁止された。もちろん霧状や粒剤の農薬散布も投下の行為に当たる。実質上で農薬散布機は、国による管理が求められ、認可が必要になった。

UAV事業部 シニアマネージャー
鳥潟 與明氏
こう語るのは、東光鉄工の鳥潟 與明氏だ。実は、これまでに国から農薬散布機の認定を受けたのは5社の農業用ドローンしかない。東光鉄工の機体のほか、エンルートの「AC940-D」、丸山製作所の「MMC940AC」(エンルートのOEM)、ヨコヤマコーポレーション(TEAD)の「Mulsan DAX04」、DJIの「AGRAS MG-1」の4機種だ。これに対して、東光鉄工では、3機種の農薬散布用ドローンを開発し、国から認定を受けている。
1機目は「AC940T」だ。これは前出のエンルートから部品調達し独自技術を追加して製品化したものだが、すでにこの製品は製造を終了しているため、カスタマーへの救済措置として認定を受けた。その他に独自ドローンとして、6発機の小型ドローン「TSV-AH1」(農薬4L散布用)と4発機の大型ドローン「TSV-AQ1」(農薬8L散布用)が認定済だ。
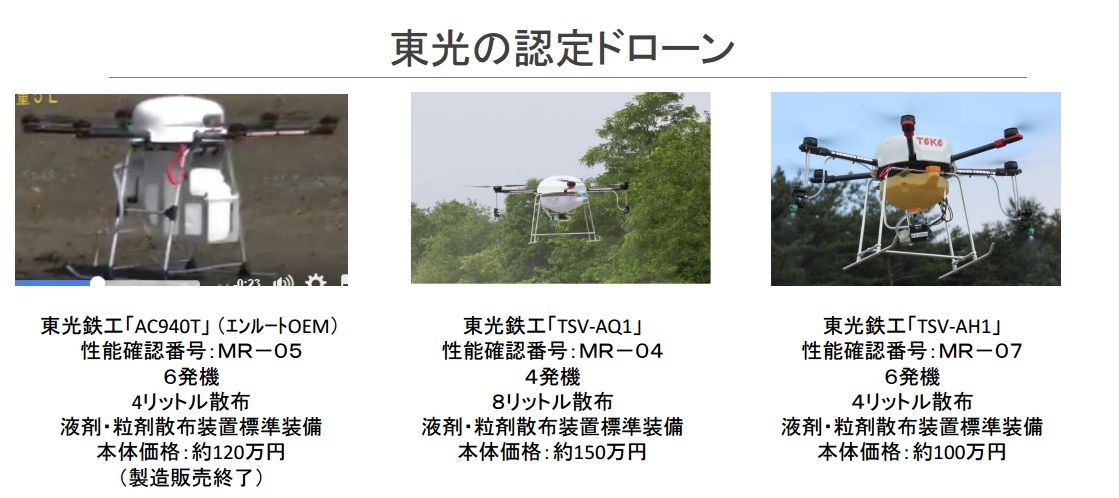
「価格はTSV-AH1が100万円、TSV-AQ1が150万円となっており、競合メーカーよりも安い価格帯です。さらに大きな特徴として、他社ならば通常はオプションになっている粒剤散布装置が、我々のドローンでは標準装備されています」(鳥潟氏)

また、同社の最新ドローンは、バッテリーに日立マクセルのドローン専用製品を使っている点も見逃せない。最近ではスマートフォンのバッテリー発火事故が話題になったが、ドローンの場合に事故が起きると、機体が墜落して甚大な被害を及ぼすリスクもある。そこで過電流などの保護回路を設けたドローン専用バッテリーを採用している。

JAXAと共同で実装実験も
さて非常に厳しい農薬散布機の認定試験だが、農林水産省の外郭団体である農林水産航空協会によって、長野県小諸市の協会技術センターで認定が行われている。ここは、ヤマハの農薬散布用ヘリコプターの試験が行われていた場所で、農薬散布ドローンの認定も同じ場所で行われている。認定試験では、試験圃場内において試験官から飛行前の確認を経て、さまざまな試験がスタートする。

「設計図はCADデータで提出し、実機との誤差は5㎜以内までに収める必要があります。具体的な試験は、ドローンから液状の農薬を撒き、その散布が均一になっているかを確認したり、散布装置の確認も行われます。この散布装置には、液剤を吹くタイミングがあり、散布スタートから1秒以内に開始しなければなりません。同様にストップから1秒以内に液漏れがなく停止します」(鳥潟氏)
このような厳しい認定をクリアしたのち、同社は国のドローン研究として、農林水産航空協会とJAXA(宇宙航空研究開発機構)が行う平成28年度のロボット技術安全性確保策検討事業にも協力することになったという。JAXAのスーパーコンピューターを使用し、マルチローターの気流や農薬分散の状況を精密に把握する実験をサポートした。
「この実験では、『TSV-AH1』を使用し、0.5ヘクタールの圃場に、最大4Lの農薬を約6分で散布しました。5cm四方の小さな試験箱を置き、ドローンのノズルブームを収縮させて条件を変えたり、風向きや風速などの環境が変化しても、農薬がうまく均一に散布できるかどうかを確認できました」(鳥潟氏)
農業用ドローンでクリアすべき2つの課題は?
関連記事
実は現在、国は農薬散布では手動で動作するドローンしか認めていない。しかし、ドローンには、自律飛行機能も付いている。手動で操縦すると、操縦者に負担もかかるし、熟練も要求される。生育状態、風向き・風速などの気象状況が変われば、操作も微妙に調整しなければならない。特に隣の圃場に農薬が撒かれると、トラブルになるリスクもある。「そこで、今後解決しなければいけない課題として、“自律飛行による自動散布システム”の開発と、“農作物の生育状況に応じた適時・適切な防除と追肥”の2点があります。我々は秋田県大潟村で新型ドローンの実証実験を行う準備を進めています」(鳥潟氏)
具体的には、自律飛行によって、圃場の撮影を行い、稲の生育状況を分析し、その結果から農薬の散布や追肥の適正時期を予測する。その結果によって、適量の農薬などを適切な場所で適切な方法で撒こうとしている。農薬の適量・自動散布イメージは次の通りで、全体で6つのステップがある。
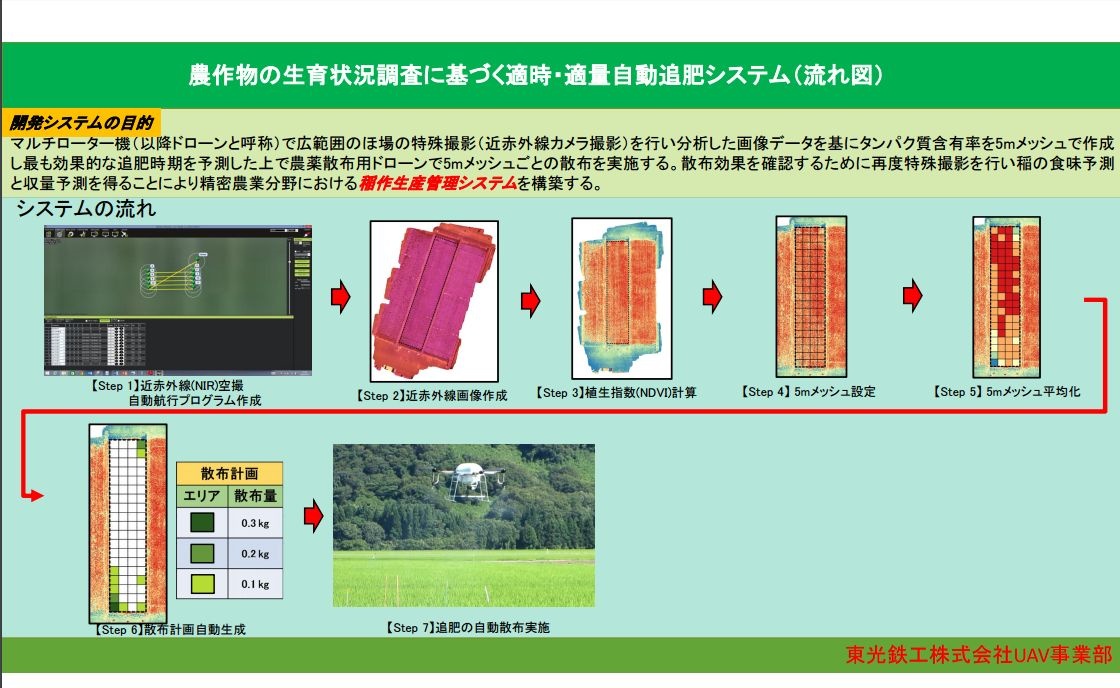
ステップ1では、特殊な近赤外線カメラを搭載したドローンで空撮を実施。ステップ2で取得データを基に近赤外線画像を作成する。さらにステップ3で適宜の画像変換処理を行い、たんぱく質の含有量を推定し、植生の指数を得る。ステップ4では、その画像を5mのメッシュに切り、各メッシュごとに6段階ぐらいの生育ゾーンに色別するという流れだ。
続いて5ステップで、5mメッシュ単位ごとに散布計画を練る。色別された生育ゾーンのなかで、たんぱく質が少ない場所は白や青い部分だ。ここに追肥を行うのが6ステップだ。これまでは、細かい生育状況が分からなかったため、追肥が不要な場所まで、まんべんなく追肥を行っていた。しかし、それでは逆に、稲のたんぱく質の含有量が多くなり、粘りが弱く、食味が悪い米になってしまう。
「そこで我々は、稲の生育状況によって、追肥の量も自由に変え、たんぱく質を抑えながら、良質な米をつくれる技術を開発し、いま特許を申請中です」(鳥潟氏)
【次ページ】国が自律飛行を認めない理由は、3つのリスクがあるから
関連コンテンツ
関連タグ
タグをフォローすると最新情報が表示されます
あなたの投稿
PR
PR
PR
