- 会員限定
- 2020/03/04 掲載
アマゾンも着手の「置き配」、ロボット配達員に可能性あり?
連載:「日本の物流現場から」
イエローのフレームに、半透明の殻をかぶった、曲線基調のボディー。このカタツムリのような、ユーモラスでかわいらしいロボットが、2020年1月30日、さがみロボット産業特区(神奈川県相模原市)で行われた『階段・段差を超えて荷物を運ぶ「ソフトロボット」実証実験』の主役である。配達員から荷物をあずかり、置き配をするロボット『Amoeba Go-1』。果たして、物流業界の人手不足解消や再配達削減に貢献する解決策となるのか──。

ロボットが荷物を「産み落とした」
今回行われた置き配実験は、ロボットを開発したAmoeba Energyが、日本郵便の協力を得て、相模原市南区にある廃校跡を利用したさがみロボット産業特区プレ実証フィールドで開催した。置き配とは、配達員が配達先住人に荷物を直接手渡しするのではなく、指定された場所に荷物を置いてくる配達方式を指す。荷物を置く場所は、さまざまだ。宅配ロッカーがあればよいが、ない場合には、玄関ドアの前、ガレージ、ガス・電気メーターボックスの中、自転車のかごなど、さまざまな場所が置き配先となる。
今回の置き配実験では、オートロックのある集合住宅を想定し、置き配ロボットが、玄関前に宅配荷物を置き配する実験が行われた。
実験当日は、民放TVキー局各社を始め、多くの取材陣が集まった。すでにニュース番組等でも報道されているから、ご覧になった方もいるかもしれない。
日本郵便の配達車両が玄関前に到着、配達員がオートロックを模した玄関前に到着し、スマホのアプリから、置き配ロボットを呼び出すと、待機していたロボットが起動し、ゆっくりと玄関前に向かって移動を始めた。時速は1km/h。こういってはなんだが、じれったい速度だ。
ただ、この速度は実験用に設定されたものであり、今後検証を重ね、適切な速度を探っていくという。ロボットの後部には跳ね上げ式の扉を備えた荷物搭載スペースがあり、配達員は、そこに荷物を載せる。荷物は、複数載せることが可能だ。
ロボットに荷物を載せれば、配達員の仕事は終了だ。ここから配達先住戸までは、ロボットが荷物を運んでくれる。
置き配ロボット最大の特徴は、階段などの段差を移動できることにある。車いす等のためのスロープが設置されていない集合住宅でも、置き配ロボットは問題なく配達することができる。また、エレベーターではなく、移動の前提を階段とした点も、置き配ロボットのポイントだろう。エレベーターがある集合住宅では、多くの住民はエレベーターをメインに縦移動を行う。置き配ロボットが階段を使えば、人の導線を妨げる可能性は少なくなるからだ。
配達先となる住戸まで到着したロボットは、ボディーを傾け、宅配荷物を指定された場所に置く。「荷物を置く」というよりも、「荷物を産み落とす」といった感じにも見える一連の動作はユーモラスだ。一方で、「置く」のではなく、最終的に「落としている」ため、荷物には、多少なりとも衝撃が加わる。このあたりは、今後の改善を期待したい。
指定された場所と言っても、配達員が行う置き配とは違い、置く場所は、玄関前の廊下である。宅配ボックスに投入したり、ガス・電気のメーターボックス内に置くことはできない。今回の実験が、オートロックのある集合住宅を想定している理由も、このあたりにあるのだろう。つまり、「オートロックのある住宅であれば、廊下に荷物を置いていても、盗まれる可能性は少ないのではないか」という見通しに基づいている。この感覚が、皆さんに受け入れてもらえるかどうか?、というのが、すなわち置き配ロボット普及のキーになると感じた。
荷物を置くと、ロボットは少し離れた場所から荷物を撮影する。撮影した画像は送信され、配達完了のエビデンスとして利用される仕組みとなっている。
LiDARを搭載する「ソフトロボット」

|
|
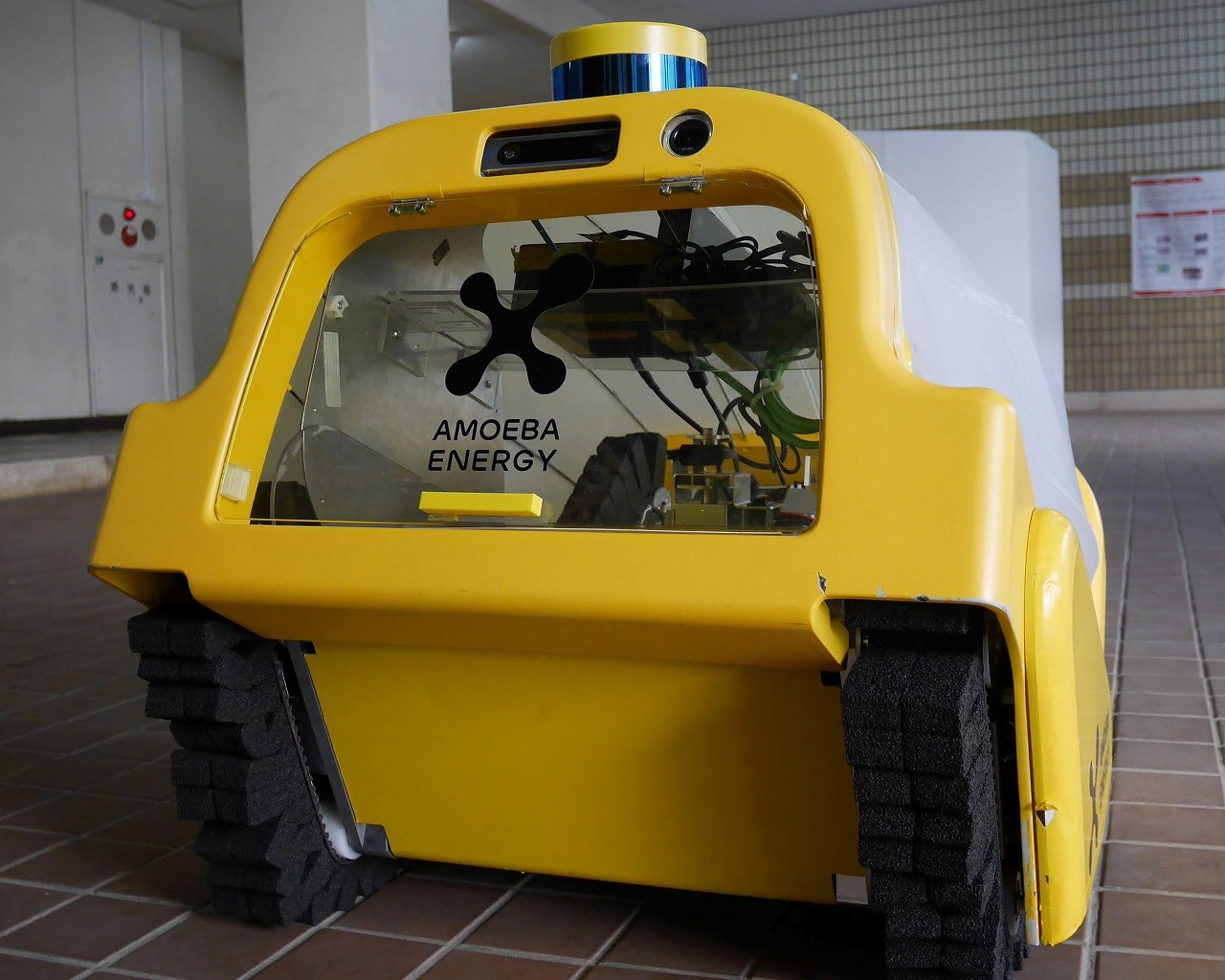
『Amoeba GO-1』の前景および後景 | |
置き配ロボット『Amoeba GO-1』について、簡単に紹介しよう。
ボディーサイズは、全長770mm、幅620mm、高さ610mm。本体重量は、24kg。積載重量は、6kgであり、2Lのペットボトル3本を搭載することを想定している。
目となるセンサーは、3DレーダーセンサーLiDARとステレオカメラを搭載している。LiDAR(ライダー)は、レーザー光を周囲に走査することによって、周辺物質までの距離や性質等をセンシングできる。測量などで使われてきたが、最近では自動運転車に搭載されるセンサーとして注目されている。
『Amoeba GO-1』は、あらかじめ作成しておいた3次元空間地図を基に、LiDARとステレオカメラによって、周囲の構造物を検知し、現在位置を把握する。GPSなどを利用するのではなく、インプットされた地図と、ステレオカメラ、LiDARからの取得情報をマッチングし、自分の位置を確定しているのだ。ちなみに、自律走行の他に、リモコンによる遠隔操作も可能である。
『Amoeba GO-1』最大の特徴は、温かみのあるユーモラスな外見と、どこか有機的な動きであろう。これは、ソフトロボットというコンセプトで創り上げられたことに由来する。
一般論ではあるが、私たちが思い浮かべるロボットと言うと、産業用ロボットの延長にあるケースが多いのではないか。金属の骨格や強力な駆動装置を持ち、人間を超える大きな力、速い動作、正確な反復動作などを求められるのが、産業用ロボットである。対して、ソフトロボットは、生物の身体を構成する柔らかい素材が持つ利点に着目する。生体が備えるしなやかな動き、適応性の高さ、ぶつかった時の安全性や、心理的な親近感などを機能として活用するのだと言う。
『Amoeba GO-1』は、ボディーの両側に中折れ構造を備えた、二対のクローラーを持つ。二対のクローラーは状況に応じ、階段を上る際にはボディーの水平を維持し、階段を上がる際には推進力として活躍し、また荷物を下ろす際にボディーを傾ける役割を果たす。ちなみにクローラーは、スポンジ状の絶妙な硬さを持つ素材でできている。開発時には、クローラーに使う素材の選定やセッティングなどで、試行錯誤を重ねたそうだ。
【次ページ】置き配ロボットゆえに、再配達も削減
関連コンテンツ
関連タグ
タグをフォローすると最新情報が表示されます
関連コンテンツ
あなたの投稿
PR
PR
PR
