- 会員限定
- 2020/01/08 掲載
デンソーが明かす、なぜ自動運転の技術開発に「ゲーム開発基盤」が役立つのか
人手不足や高齢化が進み、さらに「所有」から「共有」へと消費者意識が変わる社会において、自動車のあり方は大きく様変わりすると予想されている。そこで鍵を握るのがADAS(先進運転支援システム)と、それを進化させたAD(自動運転)だ。自動車関連メーカーやIT企業までもが、こぞってAD/ADASの開発競争に身を投じている。こうした状況において今、ゲーム業界の技術がにわかに注目を集めているという。それはなぜか。
(Photo/Getty Images)
ゲーム業界との“共創”で開発を進める自動車業界
国内外の自動車メーカーは今、ADAS(先進運転支援システム:自動ブレーキ装置や急発進防止装置などを含む、自動車のための安全装置の総称)やそれを発展させたAD(自動運転)の開発に大きな力を注いでいる。関連記事
ADASに必要な機能として、車間距離の調整や、速度を調整するアダプティブクルーズコントロール、車線に沿って運行するレーンキーパーアシスト、駐車支援・自動駐車、危険な状態に陥った場合に車両や歩行者に対するブレーキの自動介入、衝突後のエアバック作動や緊急通報システムなどがある。
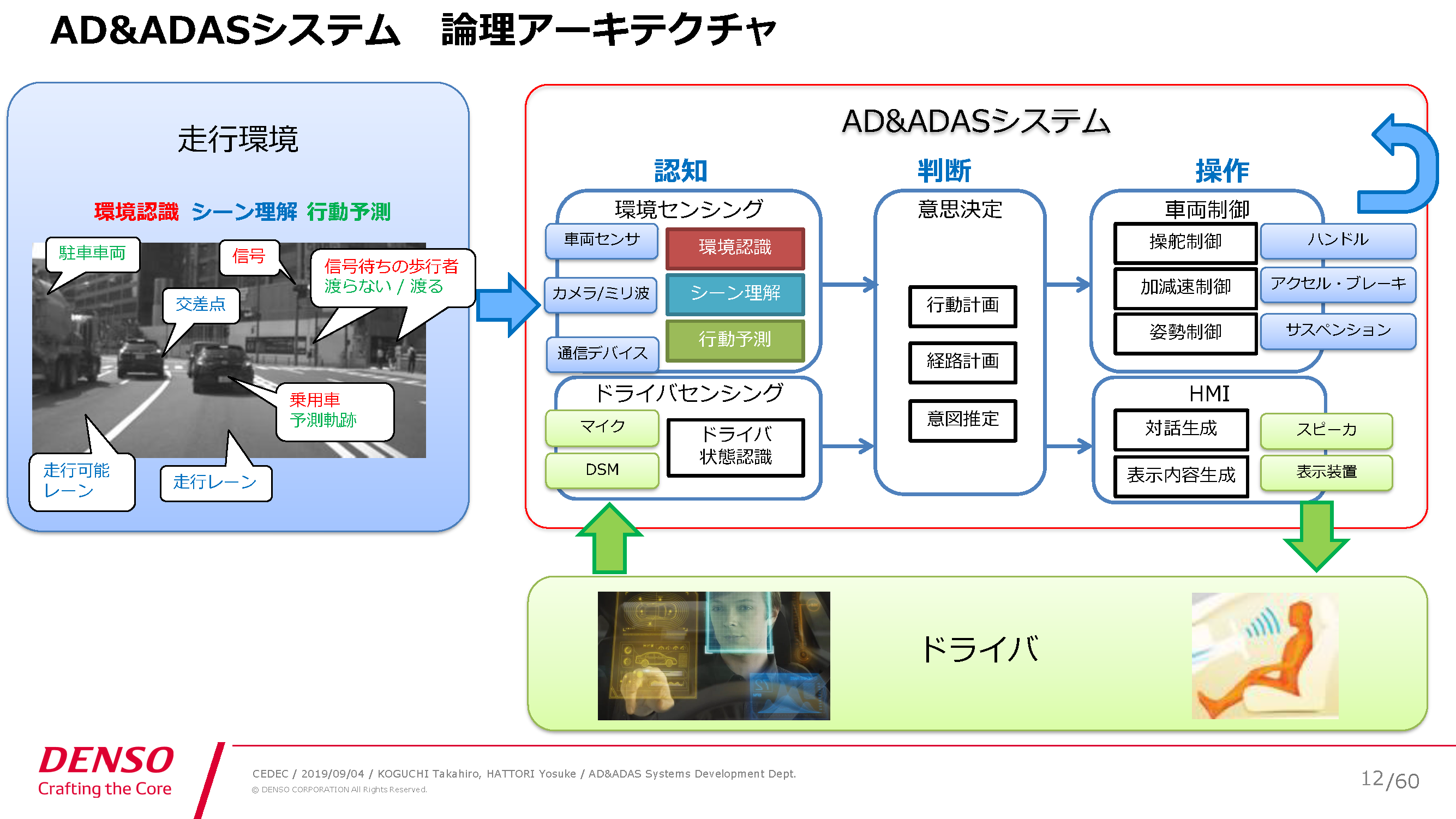
ADASは普段ドライバーが行っている「認知」「判断」「操作」の各動作の一部をアシストするものだ。一方、そのすべてを基本的に自動化するのがAD、自動運転である。
たとえば、自車が障害物を避けて走れるスペースを認知し、「どのような軌道で」「どのくらいのスピードで」走行するかを判断し、それに応じてシステム側が操作を行う。いずれにせよ、目的は人間が行っているものをシステム化して自動実行することだ。
こうしたADAS、およびADの開発において、「ゲーム開発プラットフォーム」を取り入れている企業がある。自動車部品のサプライヤーとしてグローバルに展開するデンソーだ。同社のAD&ADASシステム開発部の小口 貴弘氏は「CEDEC 2019」に登壇し、ゲーム開発基盤を使って構成する仮想環境を、いかにしてAD/ADAS開発に組み込むかについて解説した。

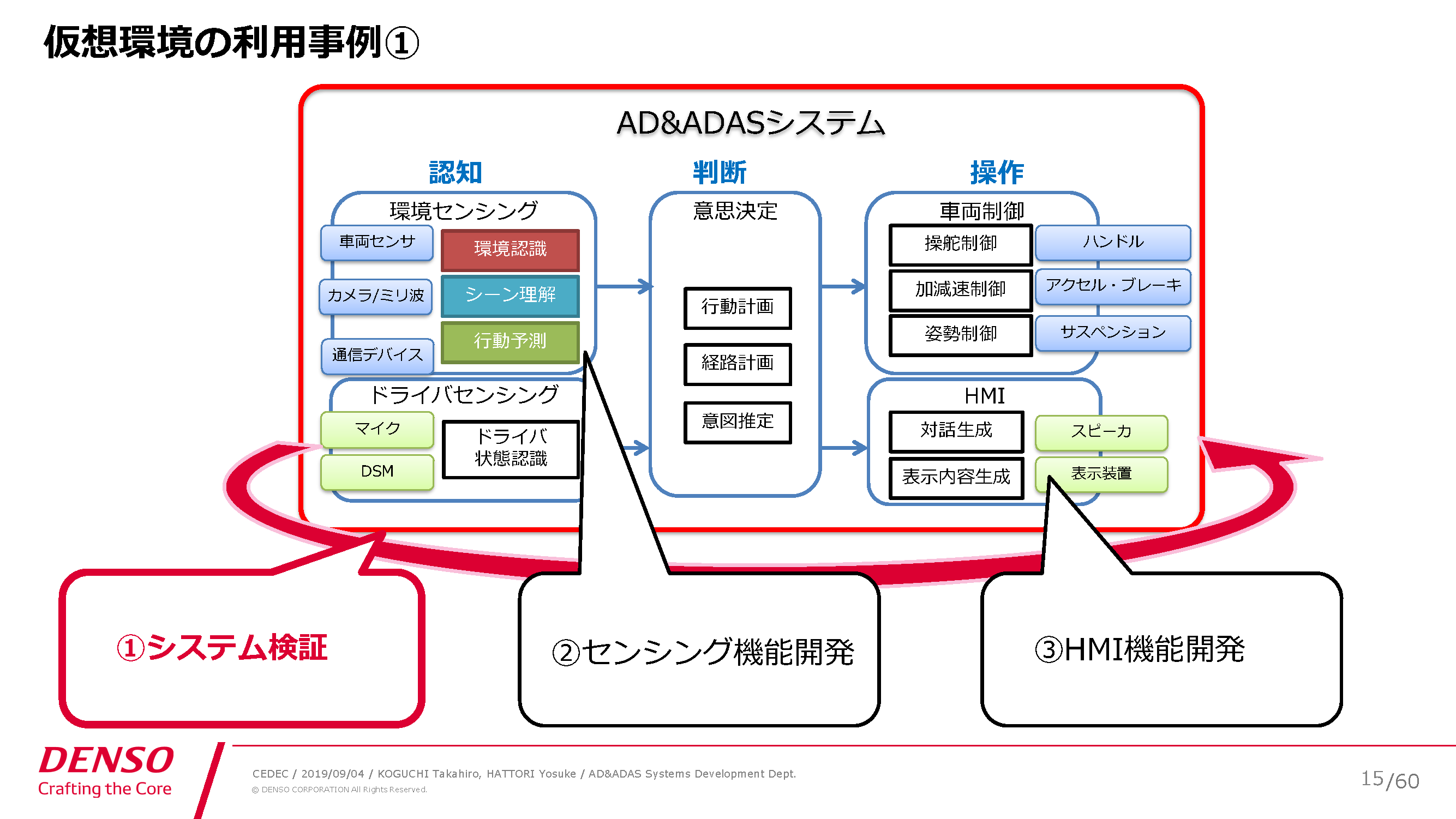
システム検証における仮想環境の活用
人命を預かるAD/ADAS製品(自動車)にとって、品質は非常に重要な要素だ。デンソーのAD/ADAS開発における品質確保の考え方は、まず「徹底した公道走行」だという。実車で一般道を走ってチェックする、難しいケースや特定の問題のあるケースはテストコースで評価するアプローチする…といった具合だ。
もう1つが仮想環境、つまりシミュレーターでAD/ADASを効率的に検証しようという取り組みが行われているという。実車による公道走行試験を、どのように行うのか検証するのだ。
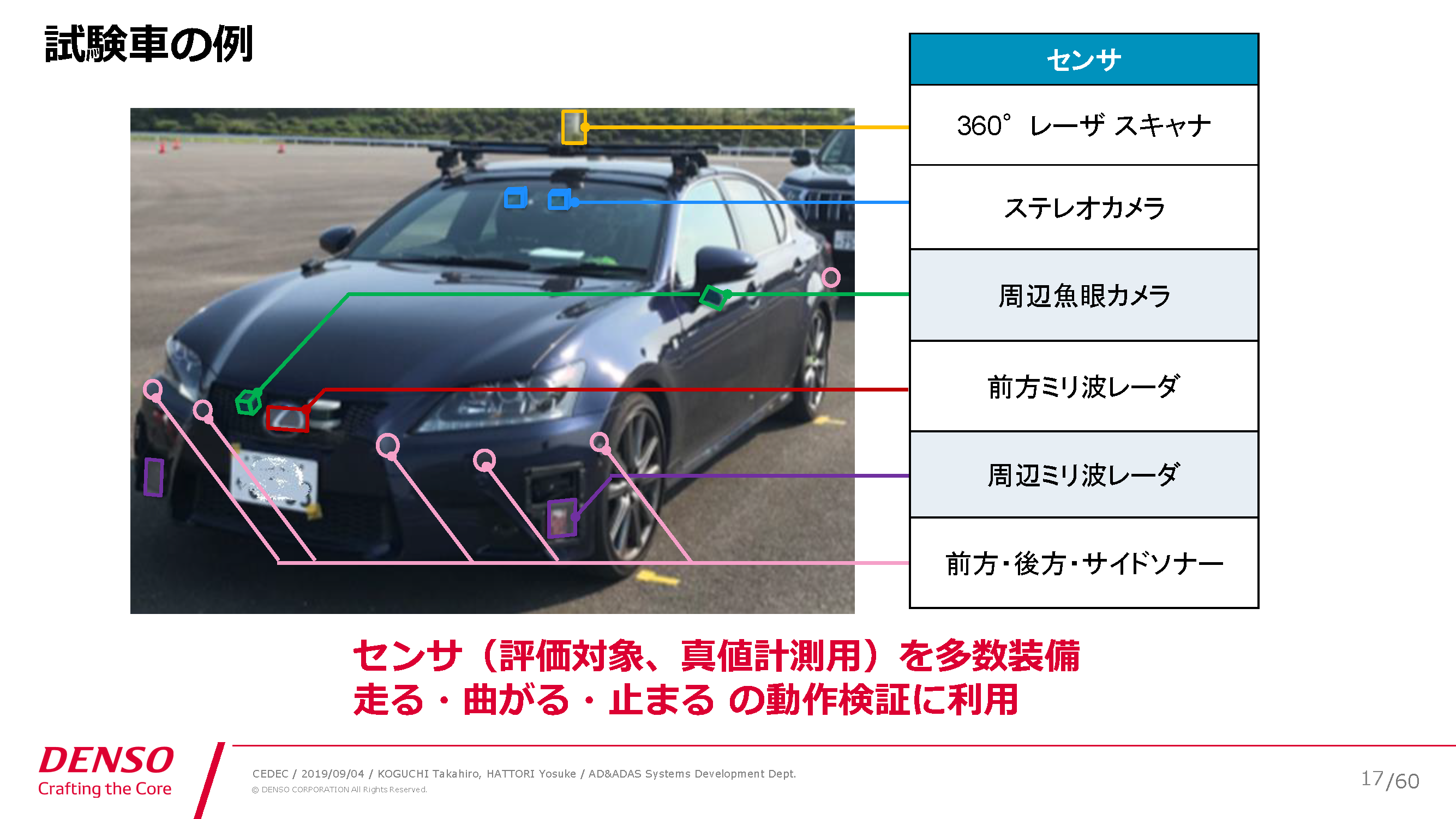
具体的には、先導するターゲット車両の後ろから試験車を走らせ、取得したログからいろいろなシステムの動きを検証する。試験車には360度レーザースキャナー、ステレオカメラ、魚眼カメラ、ミリ波レーダー、ソナーなど、数多くのセンサーが搭載され、「曲がる」「走る」「止まる」といった走行時の動作のログを収集する。それら膨大なログを使ってシステムを検証する仕組みだ。なお、通信網がない場所ではハードディスクに保存したログをあとで処理する方法を採用した。
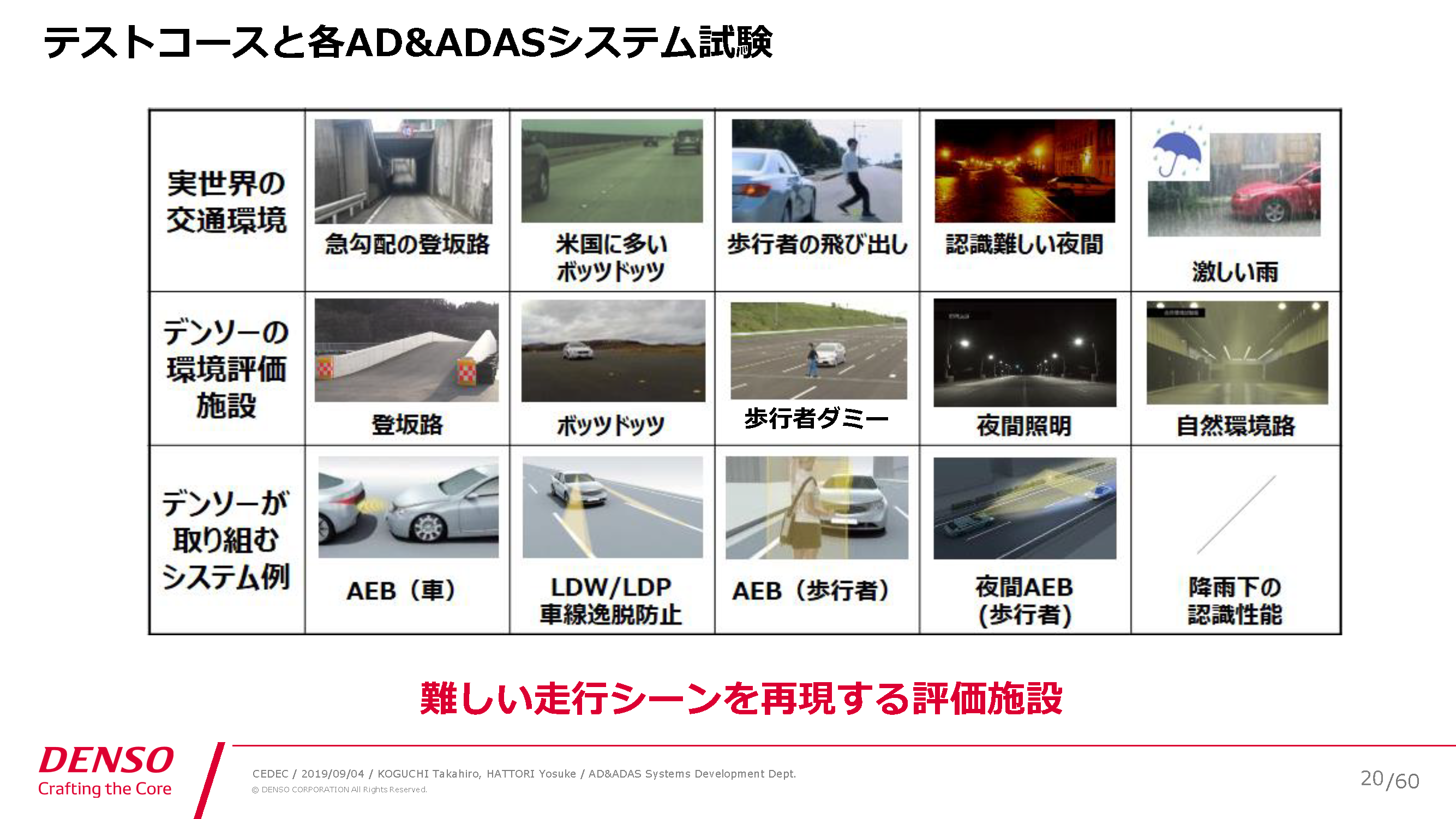
また、テストセンターにはテストコースのほか、AD/ADASの検証のために屋内で雨を降らせたり、夜間の走行ができたりする施設があり、現実世界の交通環境を模した評価テストも実施できる。
小口氏は、Tesla(テスラ)のCEOであるイーロン・マスク氏の「100億キロ宣言」を引用し、実車による試験走行の限界を指摘した。100億キロ宣言とは、自動運転車の信頼性を確実なものにするためには100億キロメートル(60億マイル)のテスト走行が必要だと主張したものである。
これでは、実車で1日500キロを走ったとして2000万日(約5.5万年)かかるし、100台の車で1日500キロ走っても約550年かかる。「実際には、評価する車種が異なるだけでシステムの設計変更やセンサーの取り付け位置の変更が発生し、もう実車だけではやってられないというのが、AD/ADASの開発で陥りつつある状況です」と小口氏は指摘する。
こうした課題を解決するために注目されているのが、ゲーム技術である。ゲーム技術を使ってシステムの評価試験を効率化することで、実車の試験を削減できるのではないかと考えたのだ。仮想環境の中でフレームレートが取れていれば、実時間と合わせてシミュレーションする必要はない。
仮想環境の活用例はほかにもある。たとえば、インテルとトヨタ自動車が開発を進めているシミュレーター「CARLA」を使った「CARLA Autonomous Driving Challenge」などがそれだ。これは、シミュレーター上でさまざまなシチュエーションを作成し、おのおのが作ったAD/ADASを使ってA地点からB地点に行くまでの時間や、どれだけトラブルに合わないでいけるかを競う、仮想世界のうえでAD/ADASを競うものだ。
また、ドイツの産官学のプロジェクト「Pegasus Research Project」は、自動運転機能の試験方法の標準化を目的したもので、主要プレーヤーが集まって議論を進めている。具体的には、試作車による実証試験、実環境での走行に加え、3Dモデルを用いたシミュレーションなど、さまざまな段階における試験方法を標準化し、開発の効率化を目指しているという。
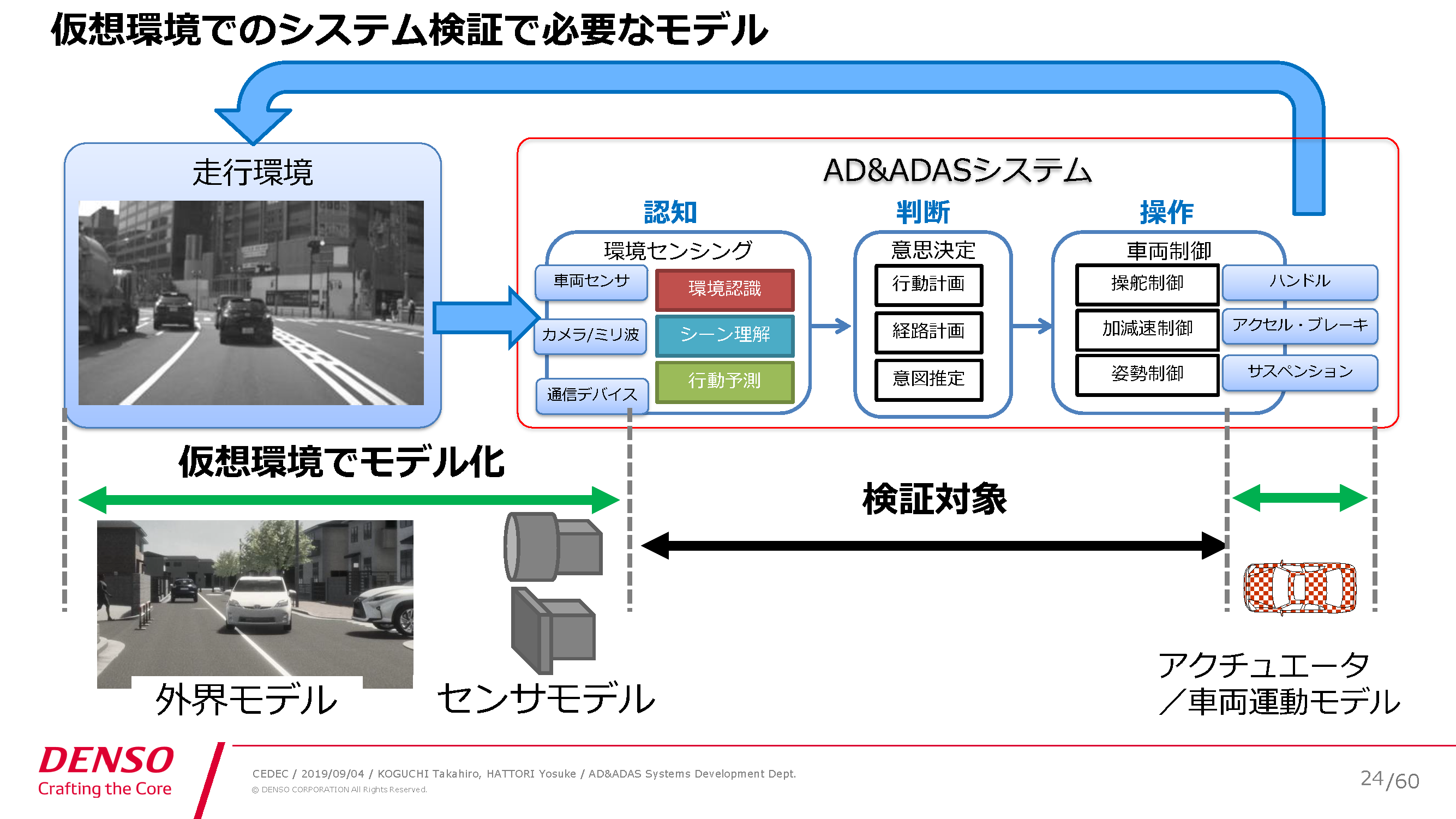
AD/ADASの検証に必要なモデルとして、小口氏は「外界モデル」「センサーモデル」「車両の運動モデル」の3つをあげる。外界モデルはゲームの「シーン」、センサーモデルは試験車に付けるセンサーの模擬、車両の運動モデルはアクチュエータのたぐいだ。
外界モデルは市街地や大型立駐、自宅周辺などの場所を決めてそのうえに用意したオブジェクトを配置し、時間変化および天候変化を与えるという形でシーンのバリエーションを作り込んでいく。ゲームスタジオのORENDAの協力のもと、具体的な駐車場のシーンを作ったという。
大型の施設を作っている日本駐車場総研に、実際に建物を作るレベルの設計図を用意してもらい、それを主にゲームエンジンとして利用されている「Unreal Engine」を用いて仮想環境で表現している。そして、完成したモデル上で、リアルタイム天候生成システムの「TrueSky」を使って時間変化および天候変化を加える。こうすることで、夕方や夜間、激しい雨など、さまざまなシーンを検証できるのだ。

ここで問題になるのが、仮想環境と実際の環境の差異である。小口氏は仮想環境の動きの検証例として、試験車の動きと仮想空間上のモデルの動きを、画像認識の特徴量で比較したものを披露した。
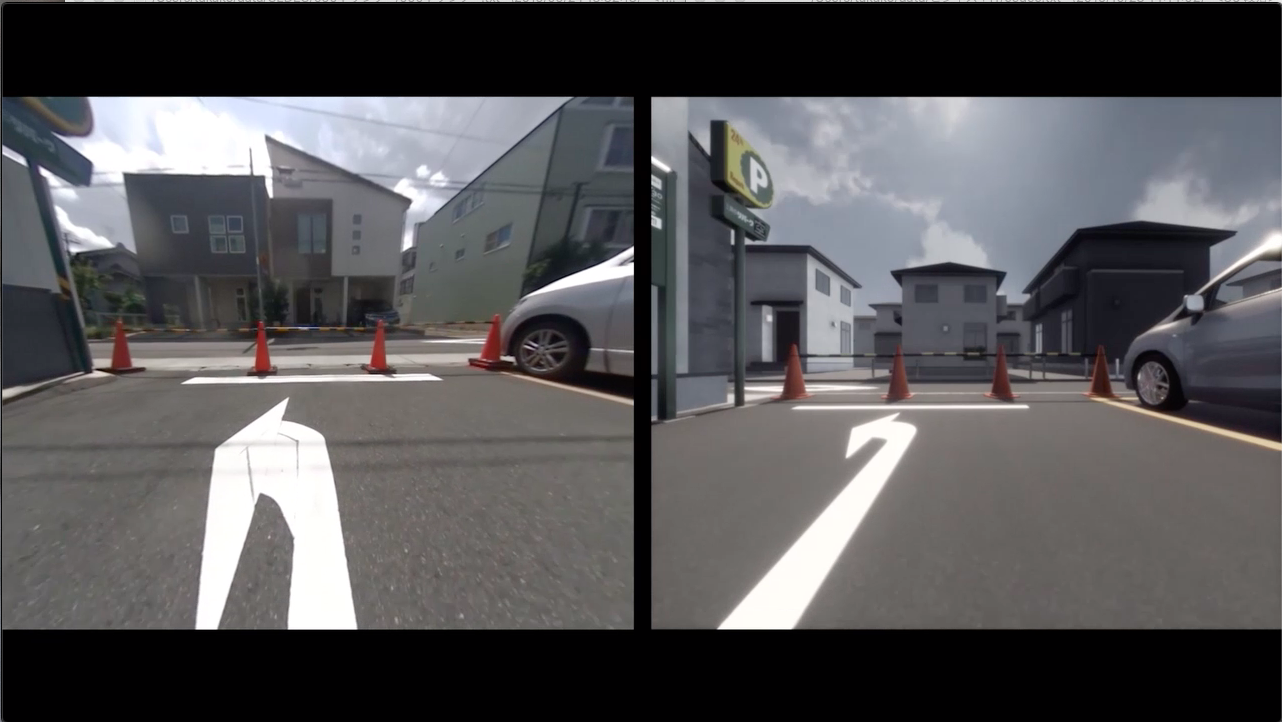
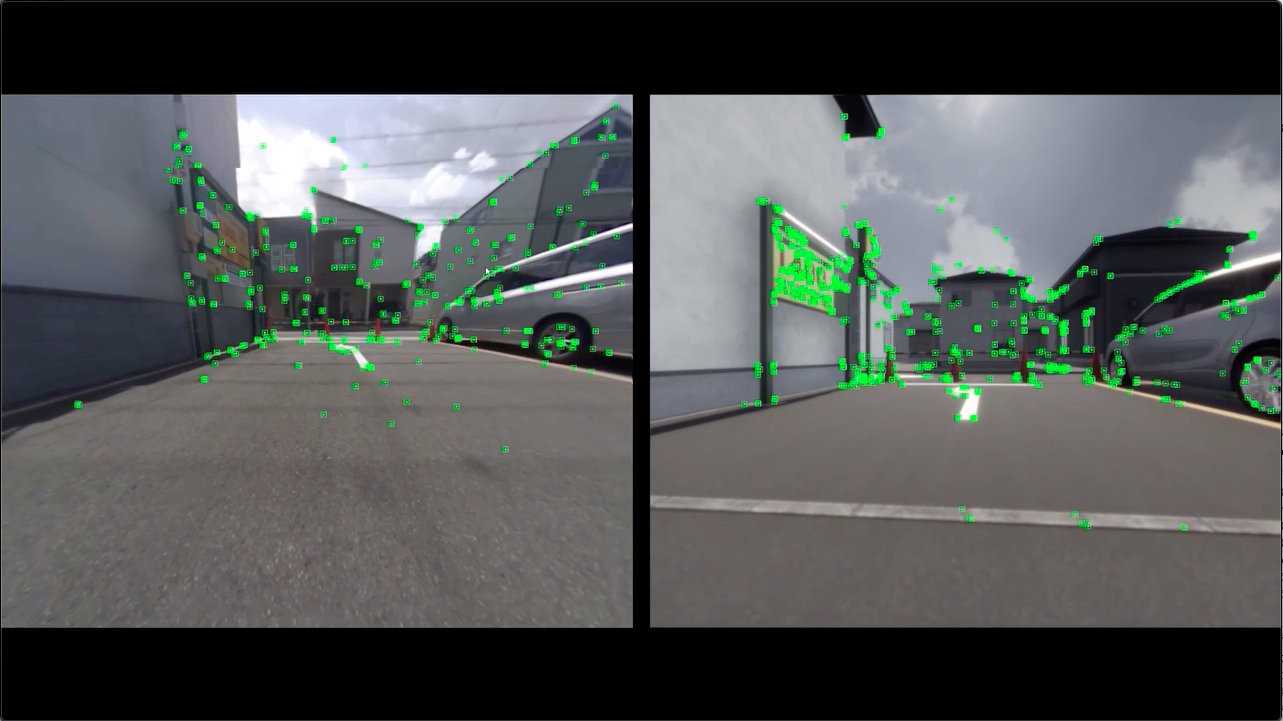
上下の写真ともに左側が実世界で右側が仮想空間だ。動きをGPSの値で同じにするようにしている。下の写真に現れている緑の四角が認識された特徴量で、これをみると現実と仮想環境で同じような結果が捉えられていることがわかる。
このように、駐車場や市街地などいろいろなシーン、いろいろなバリエーションを作って検証に役立てられることが期待されている。
【次ページ】百花繚乱のセンサーモデル
関連コンテンツ
関連タグ
タグをフォローすると最新情報が表示されます
あなたの投稿
PR
PR
PR
