- 会員限定
- 2018/01/25 掲載
ゴミ収集ロボットに学ぶAIの限界、 鍵を握る「システム」は“生命”にあり
人工知能とは何かをとらえる上で、人間の「知能」そのものへの理解が不十分であり、人間社会の在り方への理解が不十分であるという学術的な問題点がある。ここでは、従来のロボット制御技術の問題点を指摘した上で、近年注目が集まり始めている自律分散型のロボット制御技術を解説しながら、新しい社会システムの在り方を提案していきたい。社会システムというものを見つめ直したとき、従来のビジネスを一新させるヒントが見えてくる。
1982年9月3日生誕(ドラえもんと同じ誕生日)。徳島生まれ、大阪育ち。博士(工学)。2005年京都大学工学部地球工学科卒業。同大学在学中、中国北京大学に短期留学。2007年京都大学大学院情報学研究科数理工学専攻修士課程修了。同年日本電気株式会社(NEC)中央研究所に入所。MITメディアラボとの共同研究、ハチソン香港との共同研究に従事したのち、2008年、東北大学とのブレインウェア(脳型コンピュータ)の共同研究プロジェクトを立ち上げる。2015年情報処理学会にて、当該研究により優秀論文賞、最優秀プレゼンテーション賞を受賞。同年博士号取得。2016年NECを退職し独立。現在、「知能」や「生命」に関する研究を行うと共に、2017年4月、同分野における研究開発を行う合同会社アイキュベータを設立。代表社員。人工知能に関する謎を「生命」という視点から紐解く「人工知能の哲学」(東海大学出版部)や「人工知能はなぜ椅子に座れないのか: 情報化社会における『知』と『生命』」 (新潮選書) 」を執筆。

(© emieldelange – Fotolia)
ゴミ収集ロボットに学ぶ「中央制御」の限界
関連記事
昨今、「人工知能やロボットが人間の仕事を奪うのではないか」との懸念がまことしやかにささやかれている。事実、人間がこれまで行っていた作業の多くは、すでに自動化が進んでいる。その意味では、「人間の仕事の多くが人工知能やロボットに奪われている」という表現は、あながち間違いではないかもしれない。ここではまず、その最たる例を紹介したい。
豪州など一部の地域では、すでにゴミ収集に至るまでの自動化がなされている。ゴミ収集さえも自動化されるこの時代、もはや人間には何の仕事も残されなくなるのではないかという懸念も無理のない話である。さて、そうしたゴミ収集の様子を一度、ご覧いただきたい。
自動化されたゴミ収集の様子
この動画で注目していただきたいのは、14秒付近で単にゴミ収集を「失敗した」こと自体ではない。失敗した後に、ゴミ収集ロボット(アーム)が失敗したことに「気付く」ことすらできない点である。どうしてこのようなことが起こってしまうのだろうか。
ロボットの動く世界はコンピュータ上とは異なる実世界であり、「無限定空間」と呼ばれる。無限定空間とは、コンピュータ上のように、常にまったく同じ条件を再現できる(限定できる)ものではなく、どのような環境の変化が起こるのかが予想できない(限定できない)空間という意味である。
ロボットは、コンピュータ(CPU)によって制御されているので、ゴミ収集のロボットアームは、常に同じ動きを再現する。その一方で、実世界は、常に予想のできない環境の変化を起こすので、突然小石が飛んでくるかもしれないし、ゴミの量や重さが予想を上回って(または下回って)しまうかもしれない。それに、マシンの予想できない場所に、突然ゴミが詰まって動作が止まってしまうかもしれない。
もちろん、前もって予想できる環境の変化に対しては、その変化を検知できるセンサーを備えたり、その変化をフィードバックして動作を変更したりといった制御が可能である。
ただ、この方法は、まるで自分で考える能力のない部下や生徒に逐一、手続きを1から10まで「もしこのようなことが起こった場合はこのように対処しなさい」という細かい場合分けに至るまでを厳密に指示する方法と同じである。指示もれがあった際には、相変わらず「我関せず」という態度を取られてしまう。
このような指示の方法では、上司や先生が疲れ切ってしまうのと同じで、ロボットを開発するエンジニアは、「完璧な」システムを世に出す前に疲弊してしまうだろう。
こうしたコンピュータによる制御は、広い意味で「中央制御」や「集中制御」と呼ばれる。これは、乱暴に表現すると、中央に「賢い人」を集め、末端は、その「賢い人」の決定に従う、という設計思想が前提となっている。
中央制御は、「賢い人」が、すべての情報(完全情報)を入手できるという前提では、極めてうまく動作する一方で、末端の情報が必ずしもすべて中央に届かなかったり(必要十分なセンサーを前もって用意できなかったり)、中央があらゆる状況に対応できるほど賢くなかったり(アルゴリズムがあらゆる場合を網羅できていなかったり)する場合には、必ずしもうまく機能しない。
もっとも、必要十分なセンサーやアルゴリズムを網羅するのはそれほど生やさしい話ではなく、「ゴミを収集する」ためだけに、ありとあらゆるセンサーを用意するという設計思想は、そもそも経済的ではないだろう。
自律分散であるにも関わらず統制が取れる生物の謎
こうした「中央制御」の問題を解決するために、「では、末端が自由に意思決定できるようにすればよいではないか」と考えるのは早計である。学校で先生が何も指示しないと簡単に学級崩壊が起こってしまうのと同様に、ロボットや人工的に作られたシステムは、末端に制御を丸投げしてしまっては、予想できない動きをするかもしれない。さらに、その動きを修正する必要があるかどうかすらも、分からない状態に陥ってしまう。
それでは、中央制御の問題は、どのようにすれば解決できるのだろうか。
この解決の鍵を握る「システム」が、生物である。たとえば、人間という「生物」を見てみよう。人間も、脳というCPUのようなものが「中央制御」を行って、身体を動かしているように見えるかもしれない。しかしながら、実際の脳をつぶさに観察すると、「中央制御」とはほど遠い性質が明らかになる。
脳は、120億もの神経細胞(ニューロン)と呼ばれる細胞の群れであり、一つひとつの細胞は不ぞろいで、同じ動作を再現できるかどうかも心許ない、頼りないものだ。
しかしながら、そうした不ぞろいの細胞たちが群れることによって、1つの「村社会」を形成し、それぞれが1つの生物として生きながらも、全体として「人間」という一個体として動くというメカニズムを持っている。
人間の身体はさらに複雑である。神経細胞ですら、頭部だけでなく身体中に張り巡らされており、すべての細胞を合わせると60兆にも達するといわれている。そうした、一つひとつが生物である細胞は、自律分散的に動いているにも関わらず、全体として統制の取れた動きをしている。
自律分散であるにも関わらず統制が取れる生物は、どのようなメカニズムによって、それを達成しているのだろうか。
自分自身を規範とする生命のメカニズム「自己言及システム」とは?
中央制御は、見方を変えると、それぞれの部品(部位)の置かれた環境を、外側(中央)で予測して与えたうえで、その予測された環境に対しての動作を、中央の指示通りに行うという制御方法だと言える。それに対し、生物の置かれている環境では、環境を教えてくれる者もいなければ、動作を指示してくれる者もいない。自分自身を「規範」とする以外に方法はない。こうした実世界の無限定環境の中で、自分自身を規範とする生命のメカニズムが、東北大学名誉教授の矢野雅文氏が「自己言及システム」として提唱(注1)している概念である。
注1: 矢野雅文(著)「日本を変える -分離の科学技術から非分離の科学技術へ-」文化科学高等
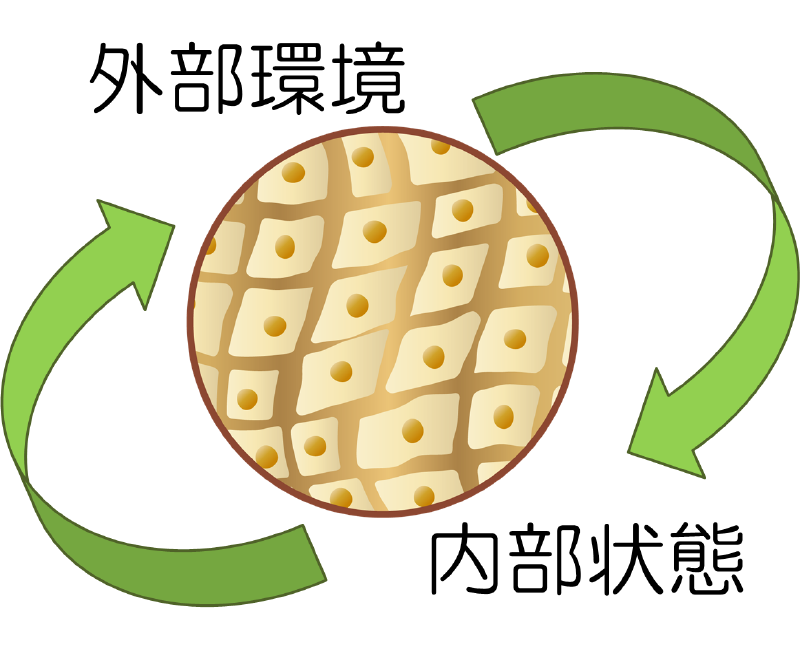
矢野の考え方は、生命システムとは、自律的に外部環境との調和的な関係を創り出し、こうした関係を拘束条件とし、自らの状態(内部状態)の在り方を決めていくものである。
すなわち、時々刻々と変化する「いま、ここ」の環境が決まることで、自分自身の状態が決まり、これにより外部環境が決まっていくという、自分自身を中心としたサイクル(自己言及サイクル)になっており、こうしたサイクルがうまく回っている状態を、「調和的関係が築かれている」状態と考える。
こうしたことは、人間関係のコミュニケーションなどを扱う分野で、概念的に語られることはあるが、工学的なシステムの設計思想として語られることはほとんどない。矢野らの研究グループは、ロボットアーム制御技術などの開発を通して、「自己言及システム」としての生命システムに関する思想の優位性を検証している。
【次ページ】生命システムのメカニズムが実現する自律分散的なロボットアーム制御
AI・生成AIのおすすめコンテンツ
関連タグ
タグをフォローすると最新情報が表示されます
AI・生成AIの関連コンテンツ
あなたの投稿
PR
PR
PR
